Esistono grandezze fisiche che per essere indicate richiedono unicamente
un valore numerico. Queste quantitá sono dette scalari (temperatura,
massa, ecc) e non presentano particolari difficoltá nella loro comprensione.
Ci sono peró anche grandezze, chiamate vettori, che vengono indicate
fornendo informazioni relative alla loro direzione e verso (forze,
accelerazioni ...). Geometricamente un vettore é rappresentabile con una
freccia caratterizzata dunque da una direzione, da un verso e da un punto
d'applicazione. Se non viene specificato il punto di applicazione si parla di
vettore libero.
- Due vettori
 sono uguali solo se
hanno la stessa ampiezza o modulo, la stessa direzione e lo stesso verso.
sono uguali solo se
hanno la stessa ampiezza o modulo, la stessa direzione e lo stesso verso.

- Sia
 , allora il vettore avente lo stesso modulo e
direzione, ma verso opposto, viene indicato con
, allora il vettore avente lo stesso modulo e
direzione, ma verso opposto, viene indicato con
 .
.
- La somma algebrica di due vettori
si ottiene applicando la
regola del parallelogramma. Da notare che la differenza tra due vettori
 é pari alla somma di
e
é pari alla somma di
e
 per quanto detto nel punto precedente.
per quanto detto nel punto precedente.
- Il prodotto di un vettore
per un scalare h é ancora un vettore,
 , avente la stessa direzione ma modulo pari a
, avente la stessa direzione ma modulo pari a
 . Se h é negativo allora il
verso di
é opposto a quello di
.
. Se h é negativo allora il
verso di
é opposto a quello di
.
- Le grandezze fisiche vettoriali appartengono a quello che in geometria
viene definito uno spazio vettoriale su campo reale. Per
comoditá riportiamo qui di seguito la definizione generale di spazio
vettoriale: Siano l'insieme R dei numeri reali e
V un insieme. Si dice che V é uno spazio vettoriale se:
- É definita in V una somma ovvero un'operazione che associa ad
ogni coppia (a,b) di elementi di V un unico elemento di V indicato
con a+b.
- É definito un prodotto esterno con elementi di R, ovvero
un'operazione che associa alla coppia di elementi (a,h) con a
 V e h R, un elemento V
chiamato ah.
V e h R, un elemento V
chiamato ah.
- Le due operazioni definite debbono soddisfare alcune regole:
- a)
- SOMMA: Proprietá associativa, proprietá commutativa, esistenza
dell'elemento neutro, esistenza dell'opposto, proprietá distributiva.
- b)
- PRODOTTO ESTERNO: Esistenza del neutro, proprietá associativa e
distributiva.
A questa definizione é necessario aggiungere il concetto di prodotto
scalare: Sia V uno spazio vettoriale su campo reale. Definisco
prodotto scalare quella applicazione
 (attenzione quindi che il p.s.
é uno scalare) con le seguenti proprietá:
(attenzione quindi che il p.s.
é uno scalare) con le seguenti proprietá:
- a)

-
- b)
 ,
,
-

- c)

-
- d)
- e pari a 0 solo se x=0.
In
 un prodotto scalare che puó essere definito é:
un prodotto scalare che puó essere definito é:
a cui é associata naturalmente la norma:
Il prodotto scalare che abbiamo definito non é l'unico possibile, ma é quello
che viene adottato normalmente, pertanto ci atterremo a questo.
Un'altra operazione fortemente utilizzata é il prodotto vettoriale
e nasce dal concetto fisico di momento di una forza.
Il prodotto vettoriale dá come risultato un vettore (c) che ha
per modulo il prodotto
 . Si
noti che se i due vettori sono collineari allora il prodotto é nullo. La
direzione é quella ortogonale al piano individuato dai due vettori a e
b mentre il verso si determina applicando la regola della mano destra.
É evidente che scambiando l'ordine dei due vettori il prodotto cambia solo
nel verso, si dice cioé che é anticommutativo.
. Si
noti che se i due vettori sono collineari allora il prodotto é nullo. La
direzione é quella ortogonale al piano individuato dai due vettori a e
b mentre il verso si determina applicando la regola della mano destra.
É evidente che scambiando l'ordine dei due vettori il prodotto cambia solo
nel verso, si dice cioé che é anticommutativo.
Un particolare da tenere bene in mente é che i versori della comune terna
di assi i,j,k ortogonali soddisfano la seguente
relazione ¨circolare¨:
 |
(1) |
Si puó pure dimostrare che il prodotto vettoriale é distributivo sia a destra
che a sinistra, cioé:
 |
(2) |
e
 |
(3) |
Applicando le eq.1, 2, 3
si ricava che il prodotto vettoriale vale, in coordinate cartesiane:
 |
(4) |
Quest'ultima equazione puó essere comodamente riscritta in notazione
matriciale ricordando la definizione di determinante:
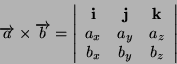 |
(5) |
Infine esiste il prodotto misto, operazione in cui compare sia il
prodotto scalare che quello vettoriale:
É possibile inoltre definire anche le operazioni matematiche di derivazione e
d'integrazione. Per la derivazione vettoriale vale il concetto di
limite del rapporto incrementale rispetto ad un parametro u:
purché tale limite esista. Se il vettore F(u) é scomponibile in
 o piú in generale in una qualunque base vettoriale, allora
o piú in generale in una qualunque base vettoriale, allora
Inoltre le consuete regole e proprietá della operazione di derivazione
sono mutuate dall´analisi:
 |
(6) |
 |
(7) |
 |
(8) |
Per quanto riguarda invece l'operazione d'integrazione si puó dire che dato
un vettore
 ,
posso definire in generale:
,
posso definire in generale:
This document was generated using the LaTeX2HTML
translator Version 2002 (1.62)
Copyright © 1993, 1994, 1995, 1996, Nikos Drakos, Computer
Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999, Ross Moore, Mathematics
Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -no_subdir -split 0 -show_section_numbers
/tmp/lyx_tmpdir9893U9NR3c/lyx_tmpbuf0/introa.tex
The translation was initiated by root on 2004-01-08
root 2004-01-08